Download
Description
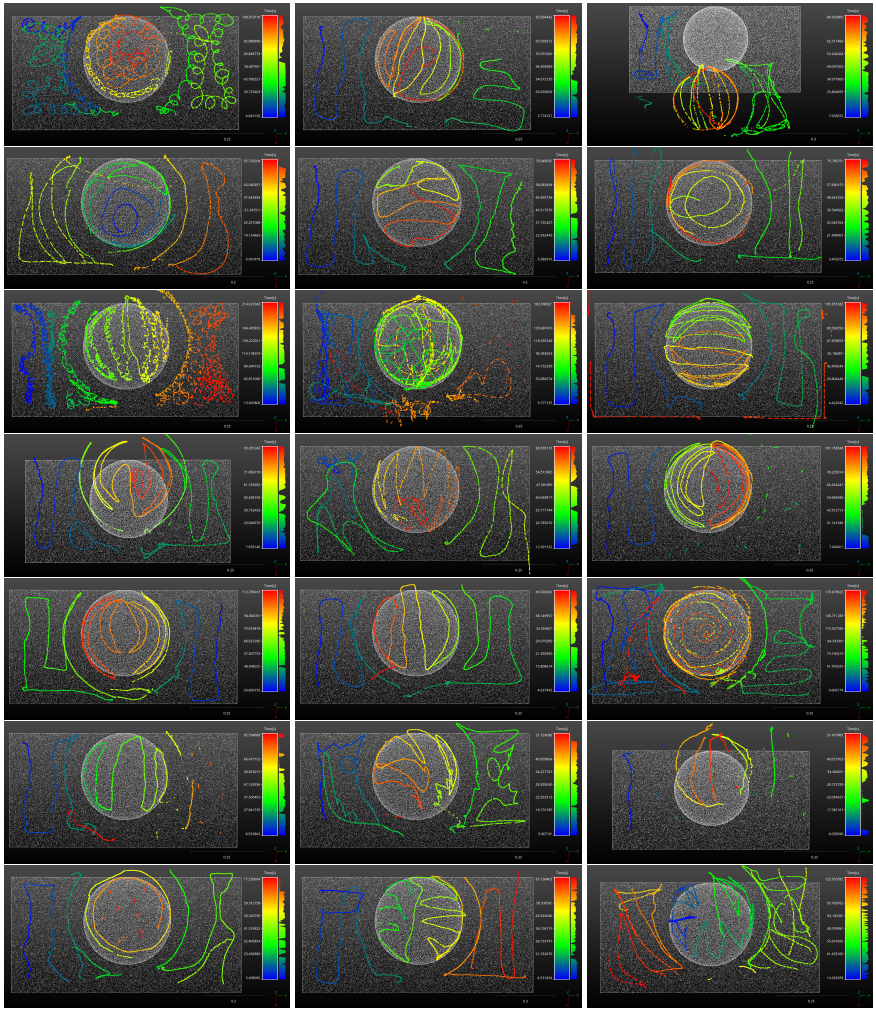
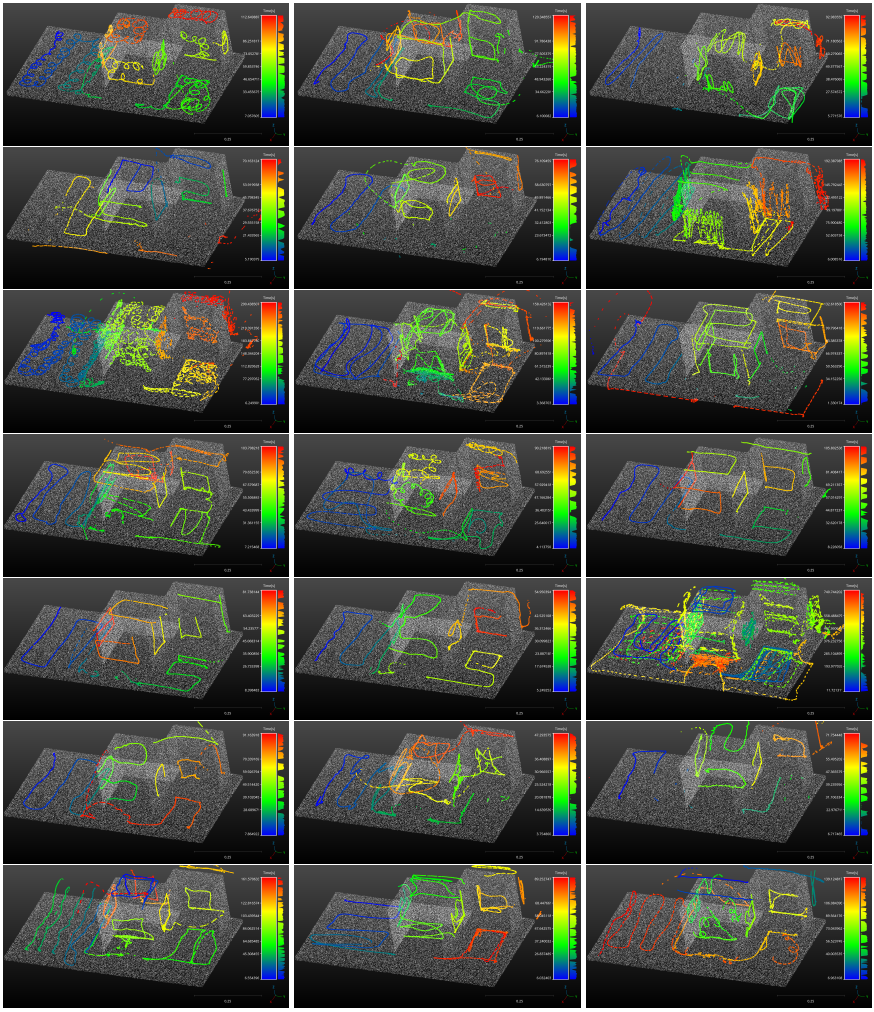
The dataset contains videos, motions, and forces of human surface processing demonstrations. Each of the 21 subjects used a powered sanding tool to process 4 different workpieces.
A description about data dimensions and a python script to read the dataset can be found here:
Box
Model

Demonstrations
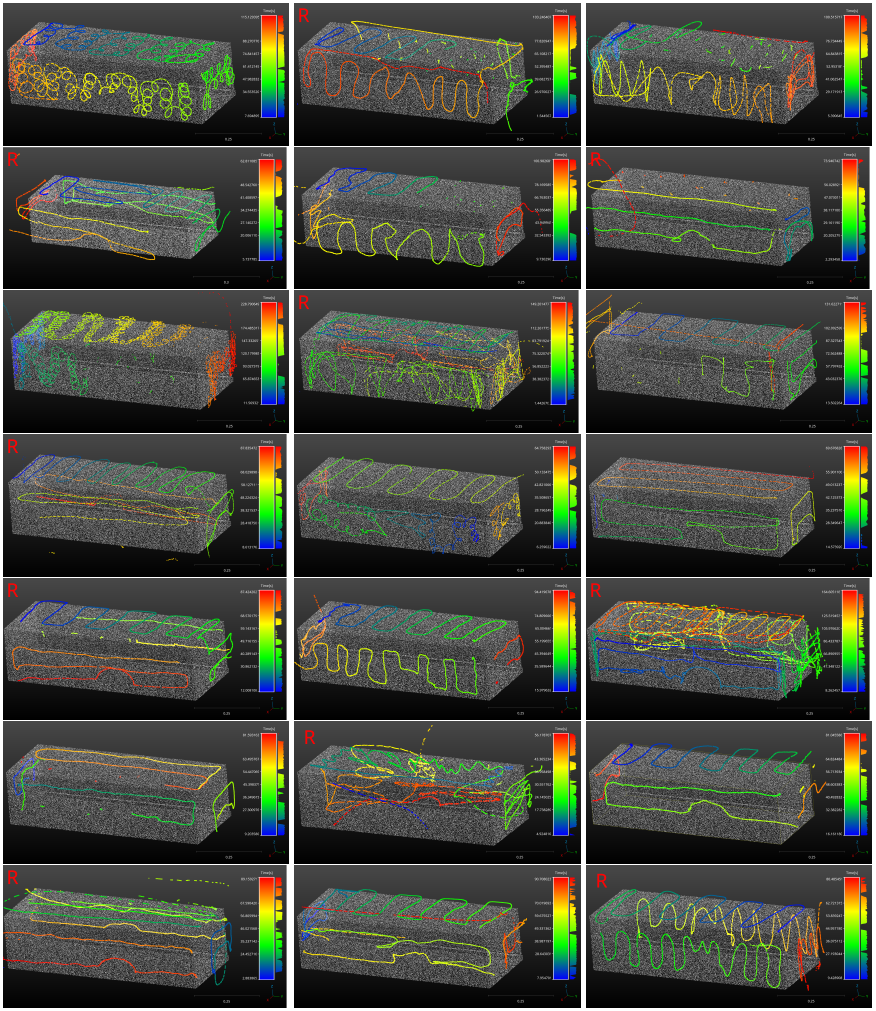
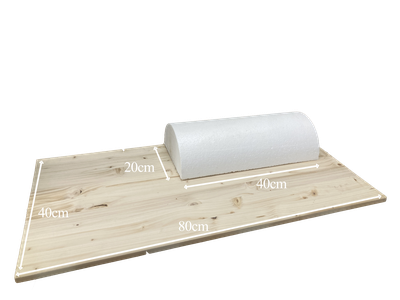
Cylinder
Model
Demonstrations
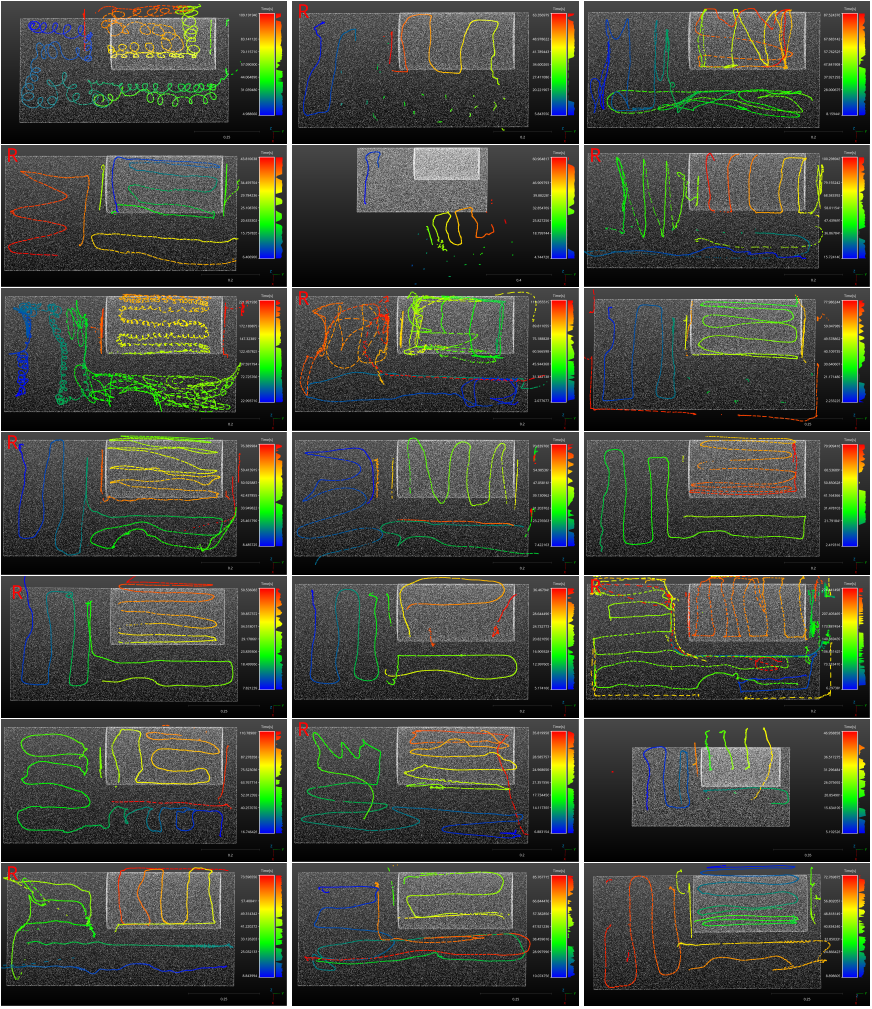
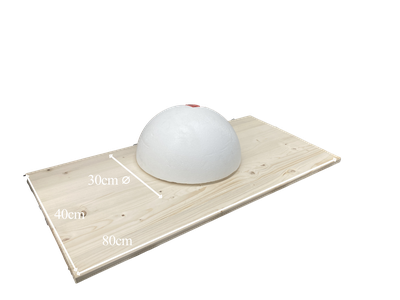
Sphere
Model
Demonstrations
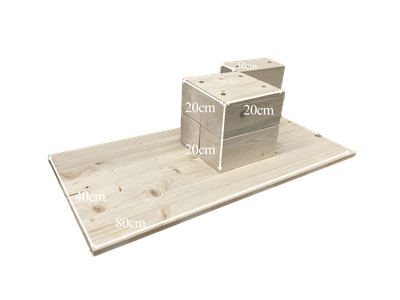
Wood Corners
Model
Demonstrations
Reference
You can find more information in the reference. Please consider citing it if you find it useful for your research.
@InProceedings{,
author = {Eiband, Thomas and Leimbach, Lars and Nottensteiner, Korbinian and Albu-Schäffer, Alin},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
title = {Extraction of robotic surface processing strategies from human demonstrations},
year = {2025},
pages = {(accepted)},
}